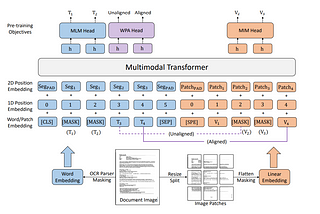
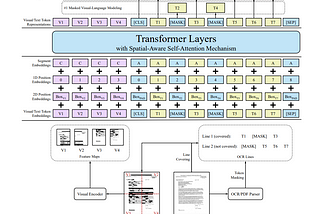
Chadrickpaper summary: “LayoutLMv3: Pre-training for Document AI with Unified Text and Image Masking”arxiv: https://arxiv.org/abs/2204.083875 min read·Jun 13, 2022----
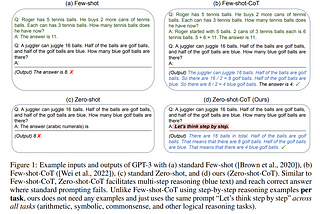
Chadrickpaper review: “Large Language Models are Zero-Shot Reasoners”arxiv: https://arxiv.org/abs/2205.119162 min read·May 29, 2022----
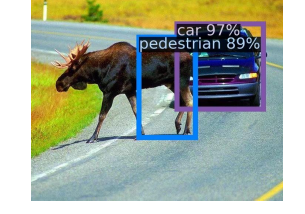
Chadrickpaper review: “VOS: LEARNING WHAT YOU DON’T KNOW BY VIRTUAL OUTLIER SYNTHESIS”arxiv: https://arxiv.org/abs/2202.011979 min read·Apr 14, 2022----
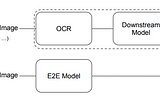
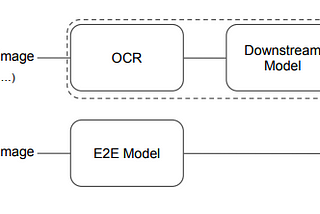
ChadrickPaper Review: “Donut : Document Understanding Transformer without OCR”arxiv: https://arxiv.org/abs/2111.156644 min read·Jan 15, 2022----
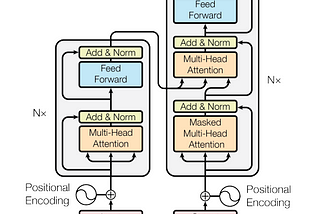
Chadrickpaper summary: “BART: Denoising Sequence-to-Sequence Pre-training for Natural Language Generation…arxiv: https://arxiv.org/abs/1910.134615 min read·Jan 11, 2022--1--1
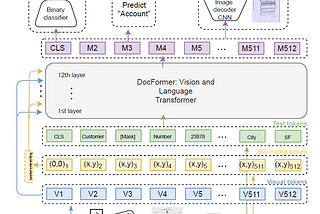
Chadrickpaper review: “DocFormer: End-to-End Transformer for Document Understanding”arxiv: https://arxiv.org/abs/2106.115396 min read·Nov 23, 2021----
Chadrickpaper summary: “LayoutLMV2: Multi-Modal Pre-training for Visually-Rich Document Understanding”arxiv: https://arxiv.org/abs/2012.147406 min read·Nov 19, 2021--2--2
Chadrickpaper summary: “BROS: A Pre-trained Language Model Focusing on Text and Layout for Better Key…arxiv: https://arxiv.org/abs/2108.045395 min read·Nov 10, 2021----
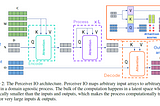
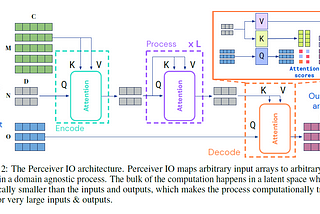
ChadrickinNerd For Techpaper summary “Perceiver IO: A General Architecture for Structured Inputs & Outputs”arxiv: https://arxiv.org/abs/2107.147953 min read·Sep 27, 2021----
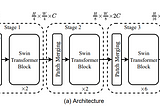
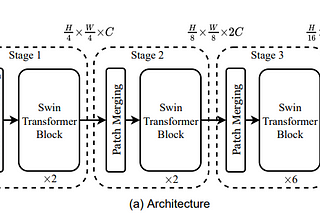
ChadrickinNerd For Techpaper summary: Swin Transformer: Hierarchical Vision Transformer using Shifted Windowsarxiv: https://arxiv.org/abs/2103.140306 min read·Sep 10, 2021----